La résignation a été mise en évidence dans un premier temps chez l’animal. Dans l’une des premières expériences, Overmier & Seligman (1967) utilisent trois groupes de chiens. Dans le premier, qui est le groupe d’échappement, les chiens sont préalablement disposés dans un harnais. Ils reçoivent ensuite 64 chocs non signalés de 60 mA sur un intervalle temporel allant de 60 à 120 s. Si le chien appuie sur un panneau qui est placé juste devant son museau durant le choc, alors ce dernier s’arrête, sinon il continue pendant 30 s. 24 h plus tard, les chiens sont mis dans une boite à navette qui est constituée de deux compartiments séparés par une barrière. Les chocs électriques durant cette deuxième période sont précédés par un signal. Le courant électrique n’est appliqué que dans un seul compartiment à la fois. Si le chien saute la barrière qui sépare les deux compartiments, le signal s’arrête et il évite le choc électrique, sinon 10 s après le signal, il lui est administré. Un deuxième groupe, dit contrôle, ne passe pas la période pré-expéri¬mentale dans le harnais. Il n’effectue que la deuxième phase de l’expérience dans la boite à navette. Le dernier groupe expérimental, le groupe résigné, reçoit l’entraînement pré-expérimental dans le harnais, mais l’appui du museau sur le tableau ne permet pas d’arrêter le choc. 24 h plus tard, ce troisième groupe est mis dans la boite à navette dans les mêmes conditions que le 1er et le 2e groupe. Les latences moyennes pour éviter le choc sont de 27 s et 25.93 s pour, respectivement, le groupe échappement et contrôle (différence non significative), alors qu’elle est de 48.22s pour le groupe résigné ce qui est statistiquement différent des deux autres groupes. De plus, 75 % des chiens du groupe résigné n’arrivent pas à éviter au moins 9 chocs sur les 10, alors qu’aucun chien du groupe évitement n’arrive jamais à une telle extrémité. Comme on peut le constater, les déficits du groupe résigné ne peuvent s’expliquer par le seul traumatisme causé par les chocs électriques puisqu’ils sont appliqués chez les chiens du groupe échappement. C’est donc la perception de l’absence de lien entre les réactions et les résultats qui crée ce que les auteurs ont appelé la « résignation apprise » (une traduction française de learned helplessness, que d’autres auteurs francophones ont également traduit par « syndrome d’impuissance acquise », « résignation acquise » ou « impuissance apprise »).
Par la suite, Hiroto (1974) va répliquer les mêmes résultats chez l’homme, en utilisant des bruits désagréables en lieu et place des chocs électriques. Il utilise le même protocole expérimental. Là aussi, l’expérience porte sur trois groupes expérimentaux. Les sujets commencent par tenter d’arrêter un son fort qui apparaît aléatoirement dans le temps. Pour le groupe "évitable"(E), il suffit d’appuyer sur un bouton pour arriver à ce résultat alors que le groupe "inévitable"(NE) ne peut rien faire. Le groupe contrôle (C) ne reçoit pas ce traitement. Dans la deuxième partie de l’expérience, les sujets sont invités à tenter d’éviter un bruit très fort qui apparaît cette fois après un signal lumineux en trouvant la bonne manipulation des boutons présents sur une table disposée devant eux. Les sujets ont 18 essais pour y parvenir. Conformément à ce qui avait été montré chez l’animal, en moyenne les sujets du groupe NE, ne réussissent pas à échapper au bruit désagréable dans 50 % des 18 essais alors que ceux du groupe E échouent dans 18 % des cas contre seulement 11 % pour ceux du groupe C. De plus, 34 % des sujets NE n’atteignent pas le critère d’échappement contre 8 % pour les deux autres groupes. La théorisation de ces résultats a connu plusieurs étapes qui, à chaque fois, se sont appuyées sur les précédentes pour arriver à une compréhension plus fine.
1 – La première conception, qui est commune à l’homme et à l’animal, est celle qui a permis de définir le socle théorique de la perception de contrôle. En effet, pour Maier & Seligman (1976), les phénomènes regroupés sous le terme de « résignation apprise » définissent un état dans lequel l’organisme a appris que les résultats sont incontrôlables par ses réponses ce qui induit chez lui une passivité face aux événements aversifs qui peuvent advenir. Maier & Seligman (1976) parle d’un « espace de contingence » entre la réponse et le renforcement défini de la manière suivante.
- Sur l’axe des y se trouve la probabilité (P allant de 0 à 1) que l’absence de réponse de l’organisme (NoR) soit suivie d’un renforcement (Rft) : P(Rft/NoR)
- Sur l’axe des x se trouve la probabilité (P) que la réponse de l’organisme (R) soit suivie d’un renforcement (Rft) : P(Rft/R)
Pour qu’un organisme apprenne qu’il n’est pas en mesure de contrôler par ses réponses les renforcements de l’environnement, il est nécessaire préalablement qu’il ait appris les probabilités précédentes (qui définissent l’axe x et y de l’espace de contingence) ainsi que la relation que ces deux probabilités entretiennent entre elles.
Autrement dit, il doit avoir appris ce qui se produit quand il ne répond pas, soit P(Rft/NoR), aussi bien que quand il répond, soit P(Rft/R).
La résignation se produit quand l’organisme apprend que, quelque soit sa réponse, le renforcement a la même probabilité d’apparaître : P(Rft/NoR)= P(Rft/R).
Par contre, lorsque ces deux probabilités de l’espace de contingence ne sont pas égales, il existe une dépendance entre la réponse et le renforcement ; ce qui permet à l’organisme d’avoir un certain contrôle sur le renforcement en fonction de la réponse qu’il produit. Plus ces deux probabilités sont différentes, meilleur est le contrôle de l’organisme.
2 – Si l’absence d’une perception de contrôle est suffisante pour expliquer les résultats chez l’animal, chez l’homme différentes études ont fait apparaître diverses incohérences.
Pour l’homme, l’explication en terme d’un enchaînement qui va pour le sujet de l’événement incontrôlable jusqu’à l’apprentissage de la résignation, suppose, pour être valide, de prendre en compte, selon Abramson, Seligman & Teasdale (1978), les attributions qu’il va effectuer face à cette incontrôlabilité. Ces auteurs (Abramson, Seligman & Teasdale, 1978) proposent donc un modèle attributif de la résignation. En effet, l’homme mis face à un événement incontrôlable va chercher les causes de ce manque de contrôle. Les théoriciens ont distingué trois axes principaux sur lesquels il est possible de distribuer les attributions des individus.
a) Dimension interne/externe - Les individus vont se demander si l’absence de contrôle est liée à eux comme leurs capacités ou si elle est causée par des phénomènes extérieurs comme la chance. Cette dimension se révèle également d’une importance capitale pour l’estime de soi. Un individu qui fait une attribution interne connaît par la même une dépréciation de l’estime alors qu’à l’inverse il protège son estime de lui-même.
b) Dimension globale/spécifique - Lorsque la résignation apparaît dans toutes les situations, on peut alors la qualifier de globale, alors que si elle n’apparaît que dans certaines catégories de situations elle est considérée comme spécifique. Un individu qui attribue son incapacité de contrôle à un manque d’intelligence produit une attribution globale. À l’inverse, s’il estime que cette absence de contrôle est liée à un manque de travail alors il produit une attribution spécifique.
c) Dimension stable/temporaire - Si l’absence de contrôle est susceptible de durer sans perspective de fin alors la résignation est considérée comme stable. Par contre, si la résignation est seulement transitoire et bien circonscrite dans le temps alors elle est considérée comme instable. Le manque d’intelligence est un facteur stable alors que le manque d’effort est un facteur transitoire.
Il importe de noter, comme le font remarquer Peterson & al. (1993), que lorsqu’un individu s’attend à une indépendance entre les réponses et les résultats, il va rechercher des explications causales de cette non-contingence. Les explications qu’il fournit vont influencer ses expectations futures de non-contingences qui, à leur tour, vont déterminer la nature du déficit en terme d’apprentissage de la résignation. Si les explications causales influencent les expectations, elles ne sont ni nécessaires ni suffisantes pour une expectation de future non-contingence, car d’autres facteurs peuvent largement surpasser leurs influences. Ce sont les expectations d’incontrôlablité qui sont les causes directes de la résignation chez l’être humain (Peterson & al., 1993).
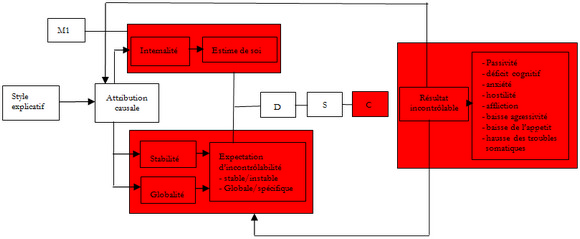
3 – Le troisième niveau de théorisation introduit encore une nuance supplémentaire dans la séquence qui va de l’absence de contrôle jusqu’à l’expectation d’incontrôlabilité : le style explicatif (« Explanatory style », Peterson & Seligman, 1984 ; Peterson & al., 1993). Le « style explicatif » est l’un des deux déterminants de l’explication causale que la personne tiendra face à un événement incontrôlable. L’autre déterminant est la nature de l’événement en tant que tel. En effet, dans certaines situations, les caractéristiques de l’événement ne laissent pas la place à la moindre ambiguïté en termes d’explications causales. Dans ces conditions, quelque soit le style explicatif de l’individu, c’est avant tout l’événement en lui-même qui dicte l’explication causale. C’est le cas pas exemple lorsqu’il existe un fort consensus social sur les raisons qui expliquent l’absence de contrôle de tel ou tel phénomène. Par contre, dans d’autres situations, il existe une place pour une certaine ambiguïté sur cette même explication causale. Lorsque c’est le cas, pour Peterson & al., (1993), le style explicatif est à même d’influencer l’estime de soi ainsi que l’apprentissage de la résignation. Dans ces conditions, la question centrale n’est plus seulement de connaître les attributions possibles pour un objet ou un événement mais de se demander comment les individus assignent des causes aux évènements dans lesquels ils sont personnellement impliqués.
Cette reformulation théorique se veut également une modélisation de la dépression et estime que, bien qu’il soit possible d’induire une résignation avec des événements positif, le caractère négatif des événements donne une importance plus grande à ces derniers (tel que les échecs).
Pour Peterson & al., (1993), l’incontrôlabilité d’événements négatifs est donc nettement plus préjudiciable que celle d’événements positifs et ce sont ces événements qui sont susceptibles de mener les individus à la dépression.
Représentation intégrée de la résignation apprise
(d’après Peterson, Maier, Seligman, 1993)